With the rapid-paced rise of AI in everyday life, nothing, not even the traditional farmer, is untouched by the technology.
A survey of the latest generation of farm tools provides a taste of just how far modern farming has come.
The Ecorobotix, a seven-foot-wide GPS-assisted “table on wheels” as some have described it, is a solar battery-powered unit that roams crop fields and destroys weeds with pinpoint precision. It boasts a 95% efficiency rate, with virtually no waste.
Energid, Universal Robots systems can pick citrus fruits such as oranges and grapefruits with a robotic system deploying multiple cameras and flexible arms.
The River LettuceBot scans crop geometry and ensures optimal growth and minimal pesticide usage by distinguishing between weeds and product as it thins overly crowded vegetable crops. This prevents oversaturation and disease.
PrecisionHawk aids all types of robotic farm operations with drone-based remote sensing and analytics.
Scientists are continuing to test new approaches to bring greater efficiency to agricultural tasks.
At the Universities of Edinburgh in Scotland and Sheffield in England, researchers are tackling the problem of visual navigation through dense vegetation, a challenge for robotic structures engaging in tasks on uneven and unmarked terrain.
In doing so, they relied on a tiny model for inspiration: Formica rufa, better known as the ant.
Ants may be tiny, but they tackle big tasks. They solve complex organizational issues and have a systematic division of labor. And they’ve done pretty well in the evolution department: They’ve been around 100 million years. Entomologists estimate there are up to 20 quadrillion living among us today. That means their mass would be roughly equivalent to the mass of all humans alive today.
In an article, “Neuromorphic sequence learning with an event camera on routes through vegetation,” published in the in the journal Science Robotics, the professors said they sought “low-power, efficient onboard solutions” for their research into robotic navigation.
“We took inspiration from insects, such as ants, that are capable of learning and following routes in complex natural environments using relatively constrained sensory and neural systems,” said researcher Le Zhu.
“Insect brains in particular provide a powerful combination of efficiency and effectiveness,” Zhu said. “Here, we provide an exemplar of such an approach, implementing a network for visual route memory on neuromorphic hardware that drew directly on recent insights from insect neuroscience.”
They designed an artificial neural network that essentially assists robots by steering them through challenging, vegetation-dense environments.
“Even ‘simple’ animals such as ants can excel at navigation under natural outdoor conditions… that still challenge current robots,” Zhu said. “One problem in such environments is to recognize previously visited places or traversed routes as the basis for a navigation system.”
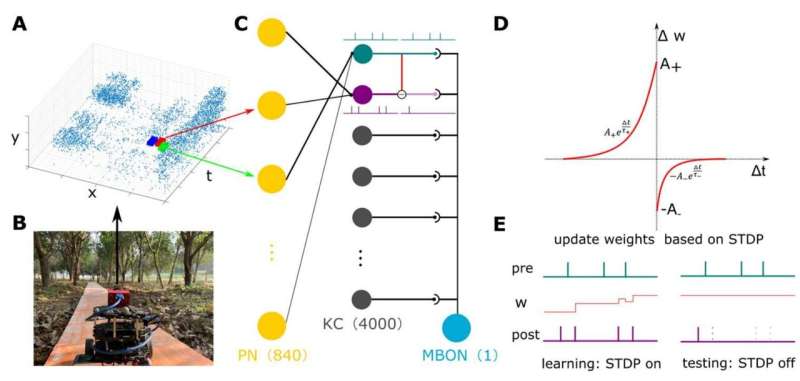
They built a robot that collects images along unfamiliar routes and developed an algorithm based on circuitry found in the brains of insects.
They relied on previous research on insect memory and “mushroom bodies,” structural components of insect brains that analyze sensory information—especially odors—and integrate it with navigation and tasks such as finding food and avoiding enemies.
The researchers tested their neural model along challenging routes on uneven, muddy, vegetation-dense fields and achieved positive results. They said their research shows promise for future applications in agriculture, forestry and environmental monitoring.
“We used a bioinspired event camera on a terrestrial robot to collect visual sequences along routes in natural outdoor environments and applied a neural algorithm for spatiotemporal memory that is closely based on a known neural circuit in the insect brain,” Zhu said. “We show that this method is plausible to support route recognition for visual navigation.”