With the advancement of ocean detection technology, autonomous underwater vehicles (AUVs) have become an indispensable tool for exploring unknown underwater environments. However, existing sensors cannot enable AUVs to identify the environment in narrow spaces where optical or sonic reflection problems may occur.
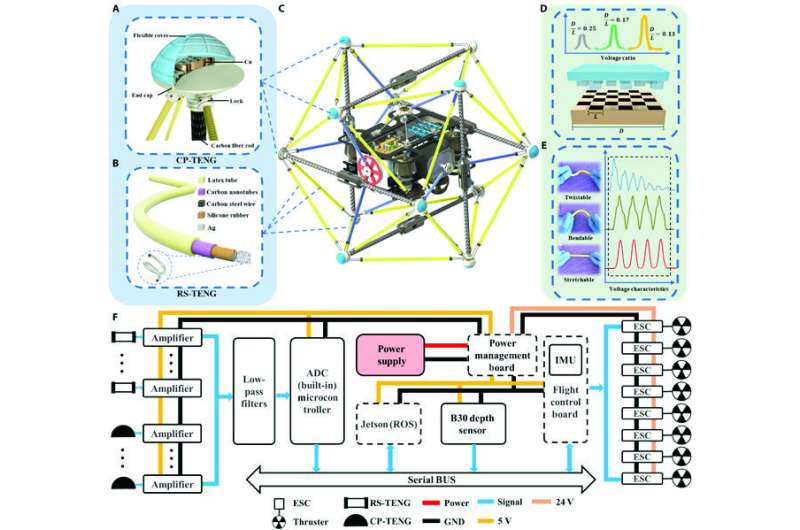
In a recent publication in Research, a study presented the design of an underwater three-dimensional tactile tensegrity (U3DTT) system integrated soft self-powered triboelectric nanogenerators and deep-learning-assisted data analytics. This device shows advantages of multiple degrees of freedom, an ultrahigh sensitivity and fast response times. It is enabled by the structure that mimics terrestrial animals’ musculoskeletal systems. This characteristic is capable of changing its shape caused by an external force.
Thus, via the 3D pose estimation of the U3DTT, it can measure and distinguish in real time the magnitude, location and orientation of perturbations from both flow field and interaction with obstacles. Moreover, the U3DTT is successfully integrated with an underwater robot. The U3DTT provides 3D sensing feedback for controlling an underwater robot in various tasks, illustrating its potential application in robotics with tactile feedback.
The paper, published by scientists from the Dalian Maritime University, Peking University and Beijing Institute of Nanoenergy and Nanosystems focuses on bionic underwater tactile sensing argued to enhance underwater sensing dimension. Currently, the main underwater perception method is highly dependent on sound fields.
With the continuous development of stealth/noise suppression technology, various marine powers are paying more and more attention to the research and application of non-acoustic physical field detection technology. Especially in near-field detection, underwater tactile perception based on hydrodynamic field can provide effective physical characteristic information of targets and environments and has significant application value in underwater target detection and deep-sea operations.
This result represents a sufficiently striking advance in underwater sensing technologies and applications. As Professor Xu who directs the Laboratory of Marine micro-nano energy and self-powered system in Dalian Maritime University, lead author of the study states the accumulated evidence shows, “U3DTT can complete tasks such as environmental assessment and autonomous obstacle avoidance in underwater three-dimensional space via estimating its own posture.”
The authors hope that, in the future, triboelectric nanogenerator-based underwater bionic tactile perception as an important supplement to underwater acoustic/visual perception technology can solve the problem of information perception in restricted water areas and provide key information for the evaluation of surrounding environments by underwater intelligent equipment.